However:
External EEPROM (EE) has some details:
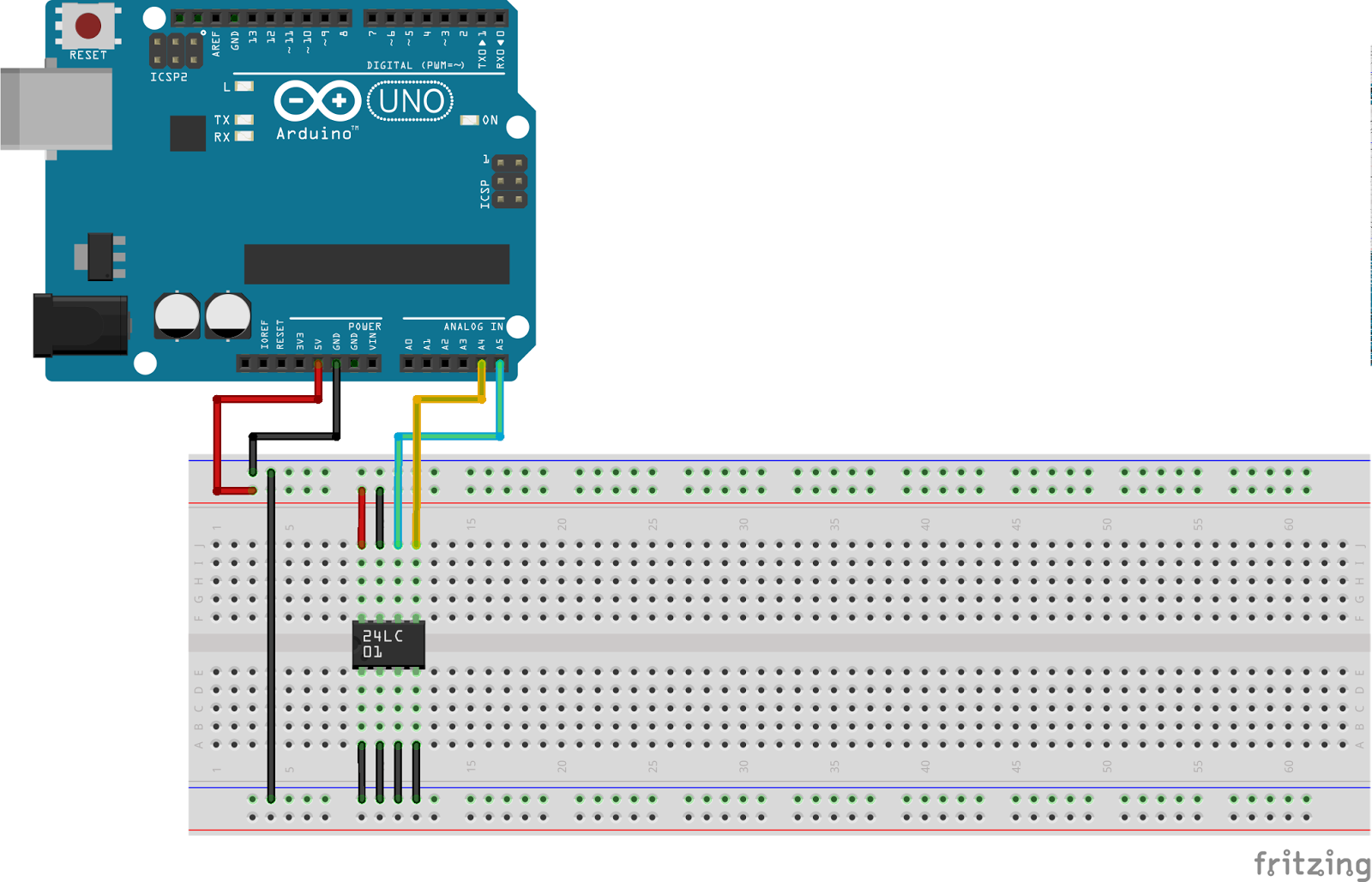
1. The pin layout is usually like this:

Things to know:
a. If this EEPROM is the only EEPROM in the project then A0, A1, A2, GND and WP pins are connected to ground. VCC pin is 5V, SCL (clock) (pin 6) to arduino pin A5, SDA (data) (pin 5) to arduino pin A4.
b. i2c protocol is being used, wire.h library handles this protocol
c. Device address is 7 bit (8th bit is not used), since A2 A1 and A0 is zero (grounded), the address becomes 1010000 or 80 or 0x50.
2. If the EEPROM size is larger than 256 byte, more than one byte is needed to address the memory
3. If data size is larger or equal to integer, more than one byte is needed to store data. In this case, disassembling and assembling of data into separate bytes is needed.



